通过机器视觉实现医疗领域的自动拾取和放置解决方案
时间: 2024-02-20 02:35:28 | 作者: 照明非球面
- 产品介绍
Irish Manufacturing Research (IMR) 是一家领先的研究和技术机构,在工业 4.0 领域提供范围广泛的研究、培训和咨询服务组合。IMR 为医疗行业开发了一款经济高效的解决方案。这款拾取和放置机器人专为自动处理膝关节植入物等复杂组件而设计。在此之前,人工执行这一任务较为容易。IMR 高级研究员 Anum Rehman 表示:“相应的机器人应用是在 Multipix Imaging 和 MVTec Software GmbH 的支持下开发的。 MVTec 提供了必不可少的机器视觉软件MVTec HALCON。IMR 由此开发出一款 3D 机器视觉应用,能够识别并定位随机排列、反光且形状复杂的膝关节植入物零件。这样,拾取和放置机器人就能精确地重复抓取各个组件并安全放下。高品质的机器视觉软件是实施过程中的关键组成部分,因为植入物的表面性质极具挑战性。”
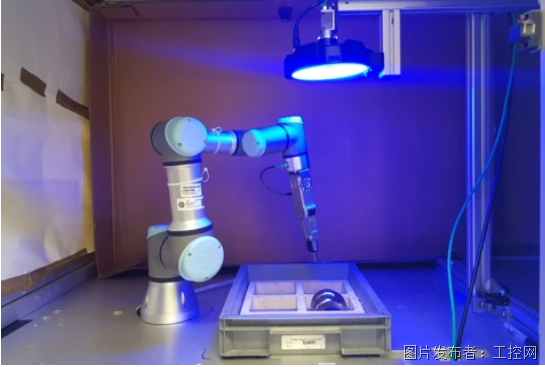
单元中是一台配备有臂端工具(抓取器)的 6 轴 UR3 机器人。为提供均匀的环境照明,安装了环形灯具。使用 2D 工业相机进行图像采集并实现物体定位。拾取和放置机器人通过安装 HALCON 软件的笔记本电脑控制。然后,通过 TCP/IP 协议将已定位零件的坐标发送到机器人控制器。机器人能在不碰触其他植入物的前提下独立拾取所有组件,并根据所属位置对其进行分类。
实施过程中的困难在于不同表面差异巨大,从哑光到高反光均有,同时形状也很复杂。零件必须以六自由度 (DoF) 加工,精准度需达到 +/-3 mm。此外,还要加上工艺环境带来的挑战:零件被容器壁遮挡,排列杂乱,并且必须在不一样的尺寸的容器中进行抓取和存放。此外,周期时间要少于 15 秒。最后,客户要确保同一套系统能够在所有抛光阶段实施。最后,拾取和放置机器人应当能够对半结构化配置的零件做相关操作和协作。
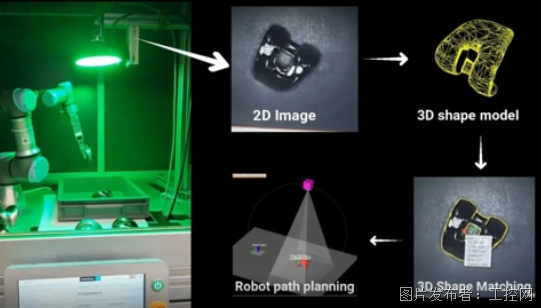
拾取和放置应用使用的相关 HALCON 技术是基于形状的 3D 匹配。这种基于形状的匹配技术能准确可靠地找到物体。即使零件旋转、缩放、透视失真、局部变形、部分遮挡、脱离图像或受到非线性照明变化的影响,该技术也能正常工作。拾取零件时,2D 相机图像会提供零件的轮廓,用以与 HALCON 中存储的 3D CAD 配置文件作比较。软件会在此基础上确定最佳零件轮廓,再将相应的 3D 坐标发送给机器人。

基于机器人的自动化应用可在可靠性、效率和成本方面满足 IMR 客户的期望。因此,IMR 慢慢的开始使用机器人和 HALCON 机器视觉软件开发其他项目。Multipix Imaging 的 Simon Hickman 也看到了自动化对其他应用和行业的好处:“我们始终相信,机器人和机器视觉软件的结合可以为更多的医疗公司带来效益。例如,我们在质量控制和拾取和放置机器人应用领域中看到了许多未来应用。”
上一篇:思泰克:机器视觉领头羊拟募资4亿元加码产能 核心产品性能突出 下一篇:柔性生产与用工难题的碰撞下「海研自动化」如何提供新时代的机器视觉检测服务?







